Tim Mueller-Sim
About Me
Projects
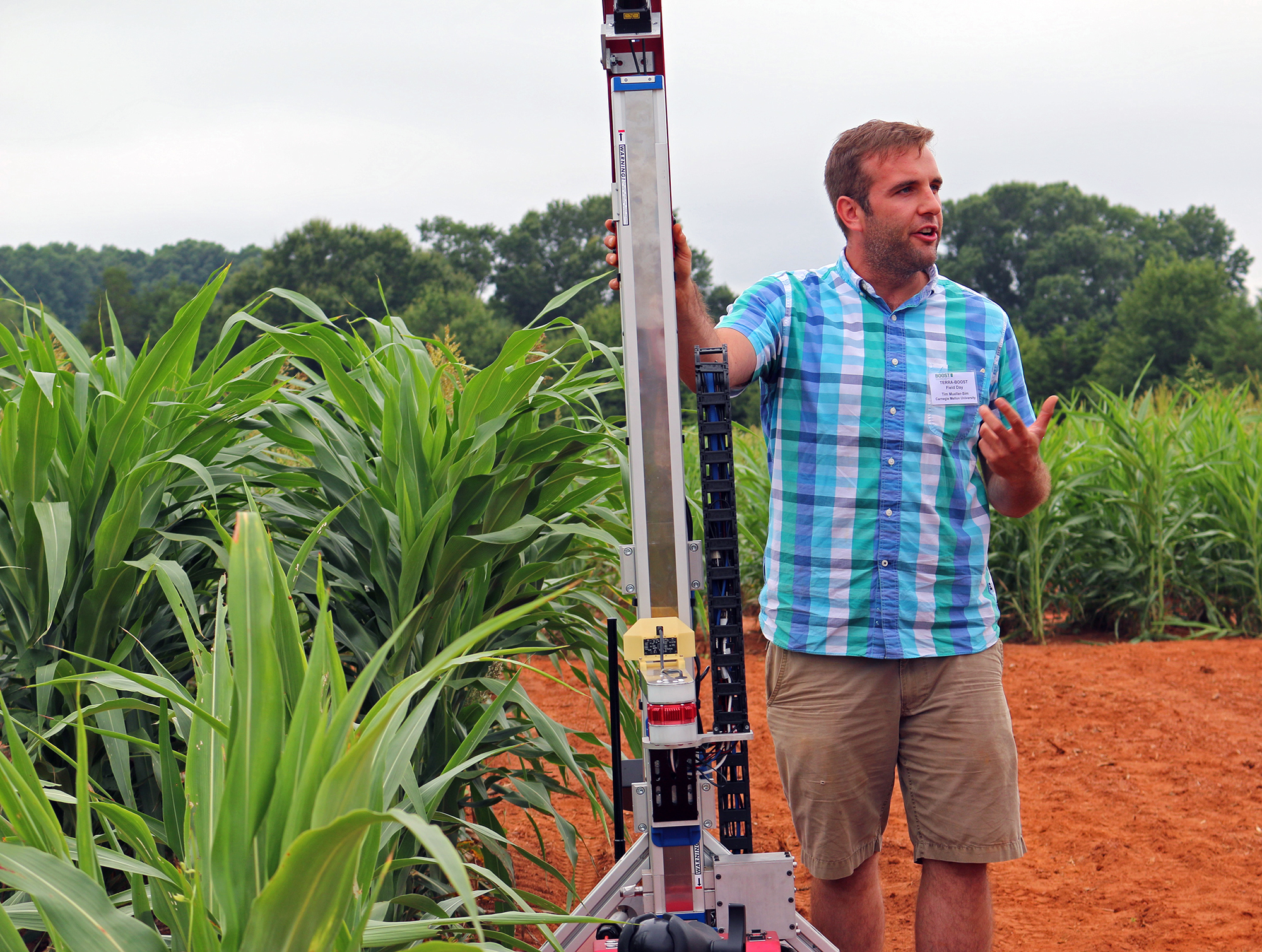
Ground Based Platform for High-Throughput Crop Phenotyping
Extrinsic Calibration of Camera and LiDAR
About Me
Projects
Ground Based Platform for High-Throughput Crop Phenotyping
Extrinsic Calibration of Camera and LiDAR
The Robotanist: A ground-based platform for high-throughput crop phenotyping